
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) ( 27 ) (28) (29) (30) (31) (27) щью которой молшо производить пзсчеты вибраций (i дельных стержней. Но прелюде чем говорить о гракич ных услоиних, найдем уравнения дв1[;кеиия перекрегтчи стержней. 3,22, Уравнения движения перекрестий стержней Стержневые каркасы в радиоконструкциях чаем представляют собой периоднческие структуры. ГТергп днчпость заключается в том, что при повороте констр\ цин на определенные углы нли при смещении ее в опг деленных направлениях можно совместить одни элсм-! ты конструкции с другими. А это значит, что. ИСИОЛЬЗ;. l одни и те же соотиошенпя, можно рассчитывать разлап ные элементы. Так, если у каждого стержня направо ii> ось X в.чоль его оси, а оси у и г---нормально к боков: i граням, то полученные выше уравнения движения о-; i-жутся пригодными для расчетов псремеи,енип }[ угл;1 поворота элементов любо) о стержня. Элементы перекрестий будут отличаться друг от лр га только числом пересекаюиигхся стерлсней, Если л \ брать наиболее сложное иерскреетпс и записать .тля п уравиеяне движения, то переход к более нростым ис] крестиям будет осуществляться только исключением с и моментов, соответствующих отсутствующим стсрл<:н1 Для радиоконструкций наиболее сложным перекрести можно считать такое, в котором встречаются четы стержня (рис. З.бО). Рассмотрим наиболее общий ел чай, когда все стсрл{:нн имеют различное сечение и г; личную длину. По длине стержня будем брать одина..  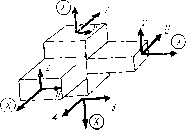 Рис. 3.60. Рис. 3.61. вое число шагов /г., поэтому шаги у всех стержней бу-;дут различными. 1 Определим для каждого стержня свою локальную [систему координат. Возникает вопрос: в какую сторону iy каких стержней направить ось х1 В общем, для вывода уравнений это безразлично, но прн ирограммнрова-нни задачи правильный выбор направления осей может значительно облегчить задачу. Рационально направить осп всех стержней от перекрестия, Это обеспечивает симметрию при построении алгоритма расчета. Но спраши-[вается: как направить оси л: у других псре;лрестнн, к ко-торым стержни подходят? У них также будем направ-1Лять оси к от перекрестия. Таким образом, в центре !калдого стержня встретятся две системы координат I с взаимно противоположным иапразлением осей х \ (см. рис, 3.60). Такую «стыковку» ле1че произвести в центре кал-уого стержня, чем у каждого перекрестия, где расчетные соотношения получаются бачее сложными. Таким образом, оси л-всех стержней у перекрестия будут направлены от его центра, а оси у и 2, как показано на рис. 3.61, Локальная система координат самого перекрестия, в которой будем записывать уравнения движения, совпадет с системой координат одного из стержней. Этот стержень назовем основны.м. <S3 Рис, 3.62, Начало координат совместим с точкой пересечении occii X стержней. Будем считать, что центр массы элемент перекрестия совпадает с началом координат. Это пре.ь положение не точно, но значительно облегчает математические выкладки. Наметим направление перерезывающих ц растяп; Еающих сил для сечений всех стержней, как это дели лось для отдельного стержня (рис. 3,62). Спроектируем Э1И силы и силы инерции на координатные olh элелеитп перекрестия:
где m--масса элемента перекрестия. Уравнения (3.66) служат для вычисления перемещений узла перекрестия и, v и iv. Значения сил определи ются формулами (3.50) и (3.52). В этих формулах величины с а.ргумситом (x + h) относятся к соседним узлам примыкающих стержней, а величины без аргумента -к узлу перекрестия- При вычислении сил псраого стержня формулы (3.50) и (3.52) остаются без изменения, поскольку системы координат первого стеркня н перекрестия совпадают. При вычислении сил остальных стержней в эти формулы нужно внести изменения, связанные с поворотом локальных систем координат стержней относительно системы перекрест)ш: для второго стержня - гг-*-:», v<--и, ш-ьу, для третьего ----1, vv, w-u, для четвертого - u-tw, w<--v. Изменения, обратные этим, нужно вводить и в уравнения движения отдельных стержней при расчетах пер;-мещеиий элементов, примыкающих к перекрестиям. Теперь составим уравнения равновесия элемента перекрестия иод действием изгибающих и крутящих моментов, моментов от перерезывающих сил и моментов инерционных сил. Направление моментов, приложенных в сечениях перекрестия, показано на рис. 3.63. РабиовЕсие пераирестия
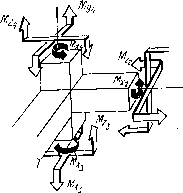 Уравнения мо.ментов будут иметь вид - Q.AJ=14 it + ) - Ц -h - )]/ .~fI«--M,3-ГM,, - Q,A,./2 Аз/2- - Q,hJ2 === [:p + x) - 2<p - 9 ( - , ГЛС /д-, /j,, H л - моменты ннерцин элемента перекрестия относительно координатных осей; if, ф и у - углы поворота перск,ре-стия относительно осей. Значении изгибающих и крутящих моментов будут теми же, что и в уравнениях для отдельных стержней (3.55), (З.об) я (3,62). Прп переходе от формул для стержней к формулам для перекрестий следует помимо изменения персмен1,ений, указанного выше, произвестн также изменение углов: для второго стержня 1(;-*-ф, cfK--, 74-, для третьего ij?-*--у, ср-<-<р, у*, для четвертого t-y, ф-*-ф, у-*--. Стержневые конструкции крепят к корпусу автомобиля или самолета н отдельных точках- Через эти точки на них передается внешнее воздействие в виде периодических колебаний или импульсов, В точки крепления помещают узлы сеткн. Прн шарнирном соединении этих точек с корпусом в них задаются перемещении и, v и w, а углы поворота вычисляются по полученным формулам. При жестком закреплении этих точек должны задавать.! и перемещения и углы поворота сечений, В частном слу чае, когда точки крепления совершают поступатсльног движение, углы поворота прЕгнимаются равными нулю. Случай стержней непрямоугольного сечения Посмотрим, как нзменякя уравнения, если стер:-!, ни имеют непрямоугольное сечение. Наиболее час (и в конструкциях применяют уголки, поэтому мы ограип чимся только этим случаем. Начнем с уравнения (3.51) для продольных колсб;1 НИИ стержня. Изменения начнутся с выражения для par стягивающих сил (3,50), где доллсна быть записана пл:1 щадь сечения уголка (рис, 3.64); = h{ab~h)E \и(.V + /г) - иЦН. (3.G7I Объем элемента также будет пропорционален площади {a-\-b-h)h, поэтому после деления левой и правой час1 i уравнения (3.49) на объем .элемента уравнение продоль ных колебании уголка получится такттм же. как и дл! продольных колебании стержня прямоугольного сеченп.! (3,52). Перерезывающие силы (3.53) и (3.54) также иролор циональны площади сечения: у (JC 4- /t) - ц(.ч- + fi) -\- ср w{x -f- /г) - i (З.Г.М а уравнения равновесия (3,53) и (3,54) получаются н( ле деления левой и нравой части на объем элемента. Пи этому эти уравнения также останутся без изменения. Сложнее обстоит дело с уравнениями моментов (3 Г>Г и (3,58), Сами изгибающие моменты были получены ,i : условия растяжения слоев вблизи поверхности стержп.! Причем поворот сечений происходил относительно tp дннной поверхности, проходящей через ось симметрии стержня. Теперь сечение стержня несимметрично. Повп рот сечений будет происходить относительно плоскостей, параллельных полкам уголка и отстоящим от них на расстояния dy и dz (рис. 3.65), Эти плоскости также называют срединными. Изгиб уголка происходит таким образом, что моменты нормальных напряжений по обе стороны от этих ллоскостей будут одинаковыми. Из этих условий (! определяются расстояния d,j и d,, В сиравоч]1и-ках по сопротивлению материалов для уго.чков разного сечения приводятся значения величин dy и rf, и мы будем считать этн величины заданными. Изгнбакпцне моменты будут теперь определяться формулами 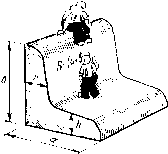 Рис, 3,64, Mt = 2Eli {a - -.lyT [? (a: f h) - +-1/3/1. 1,3.69) 1Момситы инерции элемента относительно осей, параллельных координатным осям ynzu проходящих в срединных плоскостях, можно вычислять с помощью выражений 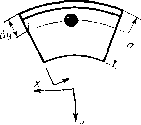 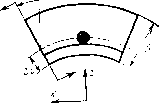 Рис. 3.65. (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) ( 27 ) (28) (29) (30) (31) |
||||||||||||||||||||||||||||
|
|