
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) ( 26 ) (27) (28) (29) (30) (31) (26) 3.20. Модель стержневого каркаса Стержневые каркасы в радиоконструкциях несут механическую нагрузку, это стойки, части блоков, кронштейны и фермы. Построение для отдельных стержней н их сочлсненич моделей-сеток но принципу моделей трехмерных тел наталкивается на большие трудности, связанные с большим количеством элементов и малыми их размерами. Поэтому для стержней, так же как и для пластин, вводится упрощение в модель на основе различных гииотсз о распределении перемещений ,и напряжений по сеченшо стержня. Это позволяет строить для стержней одномер ные модели в виде цепочки узлов. Однако для радиоконструктора расчет отдельных стержней иредставляст только теоретический интерес. На практике приходитс.ч рассчитывать достаточно сложные стержневые [юнст-рукцни, состоящие из десятков стержней. При построении расчетных соотношений для мест сочленения записываются свои уравнения движения. В общем случае, когда стержни приходят в места сочленения иод произвольным углом, такие уравнения получаются довольно сложными, поэтому мы ограничимся только случаем, когда все стержни в перекрестии ориентированы по отношению друг к другу под прямым углом. Этот случай встречается в конструкциях наиболее часто. 3.21, Модель отдельного стержня В радиоконструкциях встречаются стержни ирямо-угильного сечения, а также выполненные нз уголка ил]: другого профилированного материала. Строго говоря, гипотезы, иа основании которых производится упрощение модели, справедливы только для стержней прямоугольного сечения. Однако часто эти гипотезы распространяют и на сечения другой формы. Это, разумеется, приводит к погрешностям, которые трудно оценить, Н(. другого способа не придумали, н нам придется nofmi И тому же пути. Мы получим уравнения движения для прямоугольных стержней, а затем укажем на те изменения, которые нужно произвести для стержней инога профиля. Для пластин быля приведены два способа построе ния модели. Первый способ основывался на гипоте.1. прямых нормалей, и в нем не учитывалась инерция вра-162 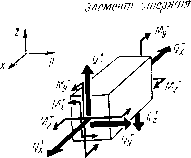 Рис, 3,58. щеиня элементов. Прн втором способе учитывалась инсрпия вращения, но вместо одного уравнения получалось три. Прн построении моделей стержней можно также следовать одним из этих путей. Однако при построении расчетных соотношений для перекрестий стержней второй путь предпочтительнее. Поэтому мы ограничимся только этим случаем. В расчетах стержней рассматриваются независимо друг от друга четыре вида деформации: растяжение, два изгиба во взаимно перпендикулярных плоскостях и кручение относительно оси стержня. Считают, например, что деформа1;ки изгиба не зависят от растяжения, а деформации крученияот деформаций изгиба. В местах сочленения стержней одни виды деформаций переходят в другие. Например, нзгибныс колебания одного стержня переходят в деформаиии растяжения другого стержня. Все четыре вида деформаций отдсльиьж стержней получаются взаимосвязанными. Поэтому необходимо получить соотношения для всех четырех видов деформаций. Раздели! стержень на элементы одинакового размера. По двум сечениям в местах разреза действуют нормальные и касательные напряжения (рис. 3.58). Нормальные напряжения создают два изгнбных момента и растягивающую силу. Касательные напряжения создают две перерезывающие силы и крутящий момент. Для составления уравнений продольных колебаний рассматриваем проекиню растягивающих сил на ось .v: Qt-Q:rna.. (3.49) Растягниающан сила определяется произведением нормальных напряжений на площадь сечения: (3.50) где hjf и половина толщины стержня в направлениях у и Z. П. 163 в уравнении (3.50) нужно взнть только ту часть кор-мальных нанряленнй, которая создается деформаннями растяжения. Эта часть определяется законом TvKa = Es Деформации растяжения, в свою очередь, находят через перемещения узлов модели-сетки е = [и(л-]-Л) - После подстановки полученных выражений в уравнение (3.49) и деления левой и правой части уравнения на объем злемента получаем ц(х 4- О - -Ь ujx ~ h) (3.51) Это и есть уравнение нродольных колебаний упругого стержня для вычисления перемещений узлов в направлении оси стержня. Чтобы рассчитать перемещення в двух других направлениях, нужно составить проекции перерезывающих сил на оси у и z. Уравнения для ие-ререзываюших сил можно записать по аналогии с уравнением (3,42), которое получено для расчета изгибных колебаний пластин: v(k + h)~v у(х 4- ft) -j-tp" w(x h) - w -i- h) + v (3.52) (3.53) Спроектировав перерезывающие силы на оси у и < и разделив полученное уравнение на объем элемента, получи.м у (X-i-h) - 2у ~{- у(х - h) у(х + /;) - у(х - к) h\ 2h, - ? > ш{х Ц-jl) - 2а-Ц(х - fi) -I--с) - 2aj 4- [f т) Этн два уравнения служат для вычисления перемещений (прогибов) V п W ъ нанравленнях нормалей к оси стержня. Для расчета изгибных колебании стержня, ни- (x4-ft)--(-y-ft) мимо уравнений проекций перерезывающих сил (3.53) и 1(3.54), ,нужны еще уравнения изгибающих моментов для 1ычнслепия углов поворота у и Ц1. Изгибающие моменты выражаются через номинальные напряжения, как мы JTO делали прн выводе формулы (3.45): =Ak h с+ /3 = 4g/igfty[Y(jc4-/i)-Y] 3 55j ЗА;, Спроектировав изгибающие моменты и моменты от перерезывающих сил на координатные оси г/ и гг, по- Л\ЧИМ 4 f\fz <р(х4-Л) -2f 4-(х -Л) w(x 4- ft) - g-(J - ) y(x 4- a) 4- 2y 4- y(x - ft) (3.57) w{x -f ft) - Y(x4-0+2Y4-7(x-ft) (3.58) где /у и моменты инерции эле.мента относительно осей у я 2 соответственно; и - угловые ускорения относительно тех же осей. Моменты инерции в этом случае можно вычислить [по формулам (,-р4АЛй%(1+Лу4;г%)/3. -?4ЛА\,Л,(1 +А=/4ЛУ3- (3.59) Подставим значения моментов инерции (3.54) в урав-(ення (3.52) и (3,53), произведем сокращения н представим угловые ускорения в виде вторых разностей от fn43B поворота по времени. В результате получим у(х4-А)-2у4-у(-) w[x 4- h) - wjx - a) y(x4-ft) 4-2y4-v(x -) pfl + , T4-- + ) + 2t + (x-A)- KJ(-c -f - Kj(jc - ,;) (3.60 Мрутящий /момент 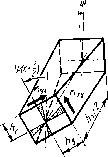 4/i2 у -• V- Это H есть доа вторых уравнения для расчета изгнбных колебаний стержня в плоскостях ху и xz. Теперь нам осталось только получить уравнение д,;! расчета крутильных колебаний стержня относнтельнс! оси X. Для этого нужно прежде всего определить величину крутящих моментов М. Крутящий моменг в каждо сечении стержня состоит и; двух частей. Первая част;, определяется касательными напряжениями Ozx, в вторая - касательными напряжениям i €ух (рис. 3,59). Ка с ател ьнь! • напряжения <у,х У иоверхнос: i стержня имеют величин. а,.(л:-0,5) =2,hy[{x-vh) - Касательные напряжения (Уу у поверхности чег < определяются аналогичным выражением ах{x + 0,S) ~~2iihz[(x-\-k)--] jh. Знак «минус» здесь появляется потому, что повор! т сечения против часовой стрелки, т. е. в сторону увели чения угла ij?, вызывае;т появление отрицательных напр-жсний Пух У верхней грани элсмснта. Вычислнв площади треугольников диаграммы кас1 тельных надряженнй и умножив их па плечи 2Ay/3 и 2/ij/3 еоответствещо, находим значение крутящего мс мента (а-J-0,5) = 4iftft{h%-\-h\) [4-{xh) - тК- (3.6::) Спроектировав крутящие моменты и моменты инс:> ционных сил на ось х, получим: + If i + А) - -hФ (я- - Н)\!Ш, = (З.Г)/> Рис. 3.59. (3.64) - момент инерции элемента относительно оси х. Подставим значение момента инерпнн в уравнение (3.63), проведем сокращение и представим угловое ускорение в разностной форме (3.65) Теперь мы получили полный набор формул для расчета вибраций стержня: (3.51) - -продольные колебания; (3.53) и (3.60) - изгнбные колебания в плоскости ху; (3.54) и (3.61) - изгнбные колебания в плоскости xz; (3-65)-крутильные колебания. В шесть полученных уравнений входит шесть неизвестных: три перемешеиня {и, и и да) и три угла поворота элемента (Ф, ф и у). Д.тя оравиен-ил приведем полученные уравнения движения 1в дмффстснцнальггой фг>р.ме Р -- л. дх 3 /dw Wy[dx дх-" дх дх /dw \ [Ъх - J Можно но,1\-мнть а,налогнчс-1ые ураннешил, если в ypaBHCHHFix (аме ;проиа:нйс-п1 разложение перемещений в <\1яя. но полиномам 1ежас1Д]1а з налрааэлениих у А z, исключить из расчетных соотно-леняй эти дзе коердииаты и orpanir-iHTbCH в 1разложе!нни толыш рулевым и пеовыми членами: ?Voo. tico, ioa, iOj ifm и вУю [9], Елш-стзснюе отличие состояло бы в там, что вместо коэффициента K-i~2H) в ураанони-1 продольных колебатвий был нзят модуль "JnraiJ, Если решить полученные разностные уравнения отно-:ительно неизвестных на верхнем временном слое [/-ht) и дополнить их начальными и граничными усло-шямн, то получится явная разностная схема, с номо- iri7 (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) ( 26 ) (27) (28) (29) (30) (31) |
|
|