
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) ( 13 ) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (13) Положим a=KIh. Шаг по времени v выберем из условия устойчивости, в нашем случае решение будет устой- В случае равенства коэффи- чивым, если циента единице шаг т=0,009 с, а остальные коэффициенты в уравнениях (2.38) примут значения Решив уравнения (2.42) относительно температуры в момент времени s + l, получим 0,12(9 0,17(0 0,5(0- -0) -0) 0)- 0,889 0,660 а 1 9 = 9 Полученные уравнения можно решать последовательно по временным слоям. Результаты расчета представим в виде таблицы (табл. 2.1). Т а б л ч ц а 2.1 Номер шага по времени 2 3 4 5 6
В нулевой строке таблицы записаны начальные условия задачи при нулевом шаге по времени Температура везде равна 20°С (293 К), поэтому величина в, равна нулю. В правом столбце записана температура блока а, изменяющаяся по линейному закону. Этот столбец можно заполнить заранее. Далее расчет выполняется последовательно по шагам, начиная с первого шага: 0=0,12-20 + 0,88-20=20; 0о=О,17.4О -f 0,66.20=20-в1=0,5-0-0=0. Таким образом, в первом шаге по времени внутри пластины и в блоке а ничего не изменилось. Они еще 84 не начали прогреваться. Во втором шаге ва=0,12-20 + +0,88-20=-20; во=0,17-41+ 0,66-20=20,17; 0i=O,5X XI-0=0,5. Начал нагреваться экран. В дальнейшем начнет нагреваться и блок а. Правда, в третьем по времени шаге температура его даже несколько понизилась. В действительности этого в данной задаче быть не может. Сказываются погрешности от представления температуры по толщине пластины в виде двучлена Qo+BitJlh. Если бы мы учли еще третий член, например, в виде 02(1,5 ylh-0,5), то погрешность была бы меньше и температура блока а не понижалась бы. Далее процесс вычислений строится по тому же самому алгоритму. 2.13. Узел за углом Температура является величиной скалярной, т. е. не имеющей направления. Это облегчает построение моделей-сеток конструкций радиоэлектронной аппаратуры. Дело в том, что экраны наподобие рассмотренного выше встречаются в радиоаппаратуре не часто. Гораздо чаще роль экранов выполняют различные кожуха, шасси и подобные им детали. При расчетах тепловых процессов в таких деталях-коробках нет необходимости в выводе новых расчетных соотношений. Можно воспользоваться уже полученными для отдельной пластины. Рассмотрим такой пример. Предположим, что производится расчет температуры в конструкции, в которой имеется кожух (рис. 2.22). Постарается разместить узлы сетки по поверхности кожуха так, чтобы шаги во всех направлениях были одинаковыми. Граничные узлы лучше располагать на 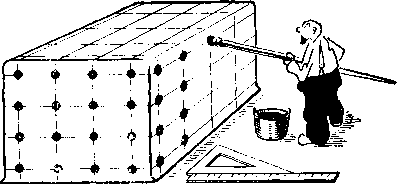 Рис. 2.22. 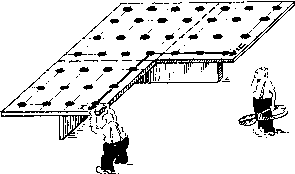 Рис. 2.23. расстоя1[ии в половину шага от липни сгибов. Разумеется, зто удается только в том случае, если все наружные размеры кожуха имеют подходящий общий множитель. Иначе придется несколько изменить размеры кожуха в модели по сравнению с действителт>ными. После этого можно сделать развертку модели кожуха (рис. 2.23) и работать с этой разверткой, как с пластиной с вырезанными краями. Если при расчете температуры на месте очередного узла окажется пустота, значит, узел находится «за углом». М.Ы иа простых примерах познакомились с расчетами тепловых процессов в различных блоках, кожухах, шасси и платах; рассмотрели иестациоиарные переходные процессы нагревания и охлаждения этих деталей. Рассчитать всю конструкцию значительно сложнее, чем .геталь, поэтому при постановке подобных задач на ЦВМ нужно использовать все возможности, предоставляемые реальной конструкцией для упрощения общей картины теплообмена. Часто конструктора интересует температура в отдельных местах конструкции в стацнонарнон, установившемся режиме, Для такого расчета можно использовать полученные выше разностные уравнения. Только в правой части уравнений первая разность от температуры по времени будет равна нулю, В этом случае вычислительный процесс уже не удается построить в виде рекуррентного по времени процесса. Приходится решать систему нз стольких алгебраических уравнений, сколько узлов будет иметь модель-сетка. Такую систему можно решить 0Д1Шм из итерационных методов. МЕХАНИЧЕСКАЯ МОДЕЛЬ РАДИОКОНСТРУКЦИИ Прошли те времена, когда радиоприемник относился к предметам роскоши и обращались с ним с великой кторолаюстью. Сейчас радиоприемники (и передатчи-и) устанавливают иа самолетах, автомобилях, кораб-1ях и ракетах, где им приходится испытывать значительные механические ускорения и вибрации. Конечно, I приемники стали прочнее, чем двадцать лет тому иа-»ад, когда основными радиоэлементами были хрупкие радиолампы и конструкторы стараются защитить их от лехаинческих воздействий с помощью амортизаторов, 10 тем не менее остается опасность возникновения раз-Шчных неполадок в работе радиоустройства под влипшем вибраций и ударов (поломка деталей, отслаивание 1ечатных проводников, появление микротрещин, пару-иающих циркуляцию электрических токов, н т. п.). Бывают и более сложные случаи отказов радиоаппаратуры, причиной которых являются механические leperpysKH, Сильные вибрационные нагрузки могут вы-)вать упругие деформации в элементах конструкции конденсаторов и катушек, определяющих, например, час-готу настройки приемника. Емкость и индуктивность колебательных контуров будут меняться с частотой внб-)ацни, искажая сигнал. Измеиеиня параметров элемен-гов могут быть настолько большими, что приемник прекратит работу. Напряжение помех возникает в проводах Н катушках, совершающих колебательные движения в магнитных полях, которые создаются внутри аппарата или проникают в него извне. Полностью защитить аппаратуру от внешних механических воздействий нельзя. Например, никакие амортизаторы н демпферы не могут уберечь радиоприемник от длительных линейных ускорений, скажем, при запуске и торможении летательных аппаратов, когда пере-ещения получаются значительно большими, чем ход мортизатора. Конструкция, подвешенная на амортизаторах, представляет собой резонансную систему. Резонансные частоты ее зависят от массы конструкции и жесткости амортизаторов. Если сама конструкция считается неде-формируемой, то рассчитать резонансные частоты системы не представляет труда [6]. Па таких резонансных частотах амплитуды колебаний будут большими, чем в конструкции без амортизаторов, Задача состоит в том, чтобы «вывести» конструкцию с помощью амортизаторов из спектра частот вибраций. Когда этого сделать не удается, применяют нелинейные амортизаторы, у которых жесткость зависит от перемещений. Но и такие амортизаторы далеко не всегда помогают уменьшить вибрации. Поскольку нет универсальных способов защиты от вибраций, конструктору приходится учитывать опасность того, что резонансная частота совладает с частотой вибрации, действующей при эксплуатации. Чтобы избежать этого, прежде всего нужно уметь рассчитывать механические процессы в конструкциях и в основном процесс упругих деформаций. 3.1. Задача расчета вибрации Механические воздействия передаются радиоаппаратуре от корпуса носителя через точки крепления. При расчетах механических процессов в конструкции движение этих точек должно быть задано. Обычно движение задается в виде величины линейных ускорений и величины амплитудных значений ускорении в заданном диапазоне частот. Эти данные являются граничными условиями задачи. Если бы конструкция аппаратуры представляла собой абсолютно жесткое тело, то все точки его совершали бы такое же движение, как и точки крепления и ничего не нужно было бы рассчитывать. Но все материалы являются упругими, и это приводит к тону, что различные точки конструкции совершают различное движение, подчас совершенно не нохолсе на днижснне точек крепления. Например, ускорения некоторых точек конструкции могут в десятки раз превышать ускорения в точках закрепления. В этом случае говорят об усилении вибраций в конструкции и оценивают его с помощью соответствующего коэффициента. Если конструк- 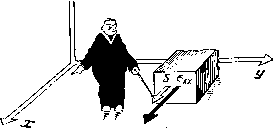 Рис. 3.1, тору известны коэффициенты усиления вибрации в раз-i личных частях конструкции, то он может разместить I менее впброустойчивые элементы в точках, где коэф-фицие!пы усиления незначительные. При расчетах коэффициентов усиления вырисовывается вся картина деформирования конструкции, и конструктор может целенаправленно ее изменять, чтобы уменьшить вибрации в некоторых частях. Попутно решается вопрос н о возникающих напряжениях. Это позволяет проверить прочность конструкции, сравнивая полученные значения с допустимыми. Зная одну категорию величин - перемещения, деформации, напряжения или ускорения, легко определить все остальные, поскольку они связаны простыми математическими зависимостями, Болыпянство марок конструкционных материалов . прн определенных условиях представляют собой идеально упругие тела (тела Гука). Основным нх свойст-вом является способность восстанавливать свою форму после снятия внешних сил. У идеальных упругих тел - между напряжением н деформацией существует линейная связь с=Ег (см. рис. 1.4), Известно, что если резину растягивать, толщина ее уменьшается. То же происходит со всеми упругими телами Простим опытом можно установить, что уменьше-I пне толщины почти прямо пропорционально увеличению I длины. Другими словами, отношение относительной по-f перечной деформации к относительной продольной де-[ формации есть примерно постоянная величина, она Называется коэффициентом Пуассона v. (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) ( 13 ) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) |
|
|