
|
|
| Главная -> Книги (0) (1) (2) ( 3 ) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (3) ражением Ф = Фо + f К - Юг) fit, (1.14) где фо - начальное значение разности фаз. Из последнего выражения следует, что Ф = Юд - Юр. (1-15) В установившемся режиме разность фаз ф - постоянная величина, поэтому частота сигнала ПГ равна частоте сигнала ЭГ, т. е. ошибка стабилизации частоты сигнала ПГ равна нулю. Подставив в выражение (I.I5) формулу (1.13), получим нелинейное дифференциальное уравнение для системы ФАПЧ: Ф-f-Юуд f (ф) = Дю,,. (1.16) Уравнение (1.16) является основным дифференциальным уравнением системы ФАПЧ; из этого уравнения следует, что в любой момент времени алгебраическая сумма разности частот Юэ-«г и расстройки является постоянной величиной, равной начальному рассогласованию частот сигналов ЭГ и ПГ. Уравнениям (1.9) - (1.15) соответствует структурная схема системы ФАПЧ, изображенная на рис. 1.8. Блок ПГ *0- Рис. 1.8. Структурная схема ФАПЧ \1р позволяет выполнить операцию интегрирования, соответствующую выражению (1.14), возмущение n{t) учитывает влияние на качество работы системы флуктуаци-онной составляющей напряжения, а воздействие бсог - влияние нестабильности частоты ПГ. § 1.4. система автоматического Сопровождения цели бортовой рлс Радиолокационная станция (РЛС) сопровождения предназначена для автоматического измерения составляющих угла отклонения линии визирования (линия рдС - сопровождаемая цель) в системе координат O/YcKcc, связаиноГт с летательным аппаратом (рис. 1.9, а). Антенна РЛС устанавливается в карданном подвесе, наружная рамка которого вращается в горизонтальной, а внутренняя - в вертикальной плоскостях (рис. 1.9,6). С антенной связана система координат 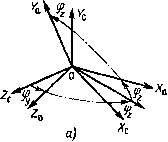 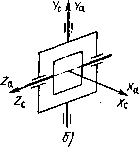 Рис. 1.9. К определению углов отклонения линии визирования: а -система координат ОХ дУд2д относительно OXYZ; б - схема карданного подвеса OXaYaZa, ось ОХа которой нормальна к плоскости внутренней рамки карданного подвеса и совпадает с продольной осью антенны. Для измерения углов отклонения линии визирования в горизонтальной ц)у и вертикальной Фг плоскостях на рамках карданного подвеса устанавливаются аналоговые или цифровые датчики. Современные РЛС строятся как мононмпульсные (одноимпульсные) системы, в которых измерение угловых координат сопровождаемой цели осуществляется по одному отраженному от цели импульсу. РЛС - это многоканальное устройство, два канала требуются для измерения составляющей угла отклонения линии визирования в горизонтальной плоскости и два-для измерения в вертикальной плоскости. Для этого в антенне РЛС формируются одновременно в каждой из плоскостей две остронаправленные перекрещивающиеся диаграммы направленности. На рис. 1.10, а изображены две такие диаграммы направленности для пеленгации цели в вертикальной плоскости; диаграммы разнесены относительно равно-сигнального направления (РСН) на постоянный угол во. Если линия визирования отклонена от РСН на угол е, который является сигналом рассогласования в системе автосопровождения, то сигналы, принятые по диаграммам направленности, будут различными: сигнал Ей принятый по верхней диаграмме направленности, будет больше сигнала Е2, принятого по нижней диаграмме; = E, + keE; En ~ En ~~" k А Ej где Ео - сигнал, принимаемый по РСН; - постоянный коэффициент. 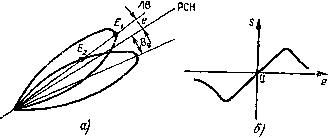 Рис. 1.10. К определению пе.,1енгацнонной характеристики РЛС: а -диаграмма ааправлениости; бпелеигадионная характеристика Разность амплитуд принятых сигналов -Е,-Е,-2КеЕ, (1.18) пропорциональна углу отклонения линии визирования от РСН. Для того чтобы исключить влияние на измерение напряжения, пропорционального углу отклонения е от абсолютных значений принимаемых сигналов £1 и Е2, разностный сигнал (1.18) нормируется суммарным сигналом: Е,=Е, + Е,=2Е„. (1.19) В этом случае отношение амплитуды разностного сигнала (1.18) к амплитуде суммарного сигнала (1.19) EJEke = S (1.20) пропорционально углу отклонения линии визирования от РСН. Зависимость (1.20) называют пеленгационной характеристикой (рис. 1.10,6). Эта характеристика определяет коэффициент передачи приемника РЛС, допустимый диапазон угла рассогласования от РСН. На рис. I.I1 показана функциональная схема моноимпульсного приемника, в котором реализация соотношения (0) (1) (2) ( 3 ) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|