
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) ( 25 ) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (25) управляющем воздействии вида Частотные показатели качества работы системы РА определяются при гармоническом входном сигнале. Качество работы систем РА относительно случайных сигналов и помех характеризуется по суммарной средней квадратической ошибке. В системах автоматической стабилизации входной сигнал является постоянной величиной, поэтому основными показателями качества таких систем являются характеристики переходного процесса и суммарная средняя квадратическая ошибка. Качество работы следящих систем, входной сигнал которых является случайной функцией, оценивается не только по переходному процессу, но и по частотным характеристикам, динамической точности работы и суммарной средней квадратической ошибке. Для оценки качества работы систем РА применяются и косвенные методы. Эти методы базируются на вычислении интегральных оценок. Широко используется квадратичная интегральная оценка: е{() + а,е{() + (О + ...+ а,[е*» (ОР] с1/, (6.2) где еСО-ошибка системы, равная разности входного x(t) и выходного y(t) сигналов; а; - постоянные коэффициенты. Качество работы системы РА определяется интегральной оценкой (6.2). Чем меньше ее значение, тем выше качество работы системы и наоборот. Меняя значения коэффициентов а,-, можно изменять влияние на интегральную оценку производных от ошибки системы. Применение интегральных оценок наталкивается на ряд трудностей, одна из которых связана с тем, что по значению интегральнойоценки нельзя судить о показателях качества и точности работы системы РА, другая - с вычислением интеграла (6.2). § 6.2. ПОКАЗАТЕЛИ КАЧЕСТВА ПЕРЕХОДНОГО ПРОЦЕССА На переходные процессы в системах РА накладываются определенные ограничения, связанные с особенно- СТЯМИ работы систем. Например, в системах автоматического сопровождения цели РЛС не допускаются большие углы отклонения антенны от установившегося значения, так как может произойти срыв сопровождаемой цели. Для повышения надежности работы механических узлов ограничивается число колебаний антенны в переходном процессе. К основным показателям качества переходного процесса в системе РА относятся следующие параметры (рис. 6.1): 1) длительность переходного процесса t„, равная интервалу времени с момента подачи сигнала до момента времени, когда выходной сигнал не будет отличаться от его установившегося значения не более чем на 5 %. 2) перерегулирование у, равное отношению максимального значения выходного сигнала в переходном процессе к установившемуся значению: Y = ymax/r/y; 3) время установления первого максимума выходного сигнала tp, характеризующее скорость изменения выходного сигнала в переходном процессе; 4) частота колебаний в переходном процессе at = =2 п/Т, где Т - период колебаний. Для нахождения кривой переходного процесса используются аналитические методы или она определяется с помощью эвм. Установившееся значение выходного сигнала системы вычисляется по теореме о конечном значении (см. приложение П.1). При единичном входном сигнале y = hmpWAp)- = W,{0), Рис. 6.1. к оценке показателей переходного процесса системы РА где WsCp) - передаточная функция замкнутой системы, в астатических системах РА установившееся значение выходного сигнала в переходном процессе равно единице, в статических системах - /С/(1+А). Если сигнал на входе системы отличается от единицы, то в переходном процессе изменяется только масштаб выходного сигнала. Пример 6.1. Найти переходуй процесс в системе ФАПЧ, передаточная функция которой в разомкнутом состоянии определяется выражением (5.10). Решение. Для упрощения постоянной времени фазового детектора пренебрежем. Тогда передаточная функция замкнутой ФАПЧ 200 (1 +р0.04) р(1-f-p0,l)-f-200 (l-j-p0,04) Преобразование Лапласа для отклонения частоты генератора при изменении эталонной частоты на Дм-1(0 А<й 200 (1 -f-p0,C4) Д<й 0,lp2 + 9p-j- 200 р * н (р) = а>з (р) Полюсы системы: Xi=-40, Х2=-50. Применив теорему о вычетах (2.13), найдем /г(/) = До)[1+Зе-40-4е-«]. На рис. 6.2 показан график переходного процесса, из которого видно, что длительность переходного процесса /„=0,75 с, а у=1,08. § 6.3. ЧАСТОТНЫЕ ПОКАЗАТЕЛИ КАЧЕСТВА Частотные показатели качества работы систем РА определяются по АЧХ замкнутой системы (рис. 6.3). Не- 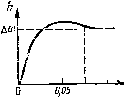
Рис. 6.2. К определению параметров переходного процесса в системе ФАПЧ Рнс. 6.3. АЧХ замкнутой системы Трудно установить, что значение этой характеристики при частоте, равной нулю, равно единице в астатических системах и Д7(1+) в статических системах РА. Для удобства АЧХ статических систем нормируется, т. е. ее значения делятся на ее начальное значение; в этом случае АЧХ статических систем начинается с единицы. К частотным показателям качества работы систем РА относятся следующие параметры: I) полоса пропускания соп -диапазон частот, в котором АЧХ больше или равна единице. Если АЧХ замкнутой системы РА во всем диапазоне частот меньше едини- (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) ( 25 ) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|